Benutzer-Werkzeuge
Inhaltsverzeichnis
OBD2
OBD ist die Abkürzung von On Board Diagnose, gemeint ist ein im Fahrzeug integriertes Diagnose-System. OBD-2 oder OBD-II steht für ein OBD-System der zweiten Entwicklungsstufe. Um die durch den Fahrzeugverkehr steigende Luftverschmutzung in den Ballungszentren Los Angeles und San Francisco zu reduzieren, führte die zuständige Behörde im US-Bundesstaat Kalifornien bereits in 1988 für Benzin-Fahrzeuge verschärfte Emissionsgrenzwerte mit der Forderung einer zusätzlichen Selbstüberwachung der Fahrzeuge ein. Die anderen US-Staaten übernahmen diese Regelungen 1994. In 1996 trat in allen amerikanischen Bundesstaaten OBD-2 in Kraft mit einer weiteren Absenkung der Grenzwerte. In Europa wurde OBD-2 ab 2001 als OBD oder EOBD in etwa übernommen.

Die Normung ermöglicht erstmals ein einheitliches Diagnosesystem für weltweit fast alle Fahrzeuge und für Europa nach dem o.g. Zeitrahmen, dessen Einheitlichkeit nur noch von wenigen herstellerspezifischen Eigenentwicklungen bzw. Erweiterungen beschränkt werden kann. Im Gegensatz zu einer oft gehörten Behauptung umfaßt diese Normung nicht nur abgasrelevante Elektronikmodule eines Fahrzeugs sondern vielmehr die gesamte Elektronik. Es liegt jedoch am Fahrzeug-Hersteller, ob er auch seine gesamte Kfz-Elektronik in die Normung integriert.
Das "D" in der Abkürzung "OBD" steht für Diagnose. OBD2/EOBD ist somit eine Hilfe zur Wartung von und Fehlererkennung bei heutigen, modernen Fahrzeugen mit einer Vielzahl von computergestützten Systemen. Ohne ein geeignetes Werkzeug (Diagnose-Gerät, Scanner, Scantool) ist das sonst kaum noch möglich. OBD ist jedoch kein System zum Tachomanipulieren oder Leistungssteigern, wie häufig fälschlich von unseriösen Anbietern behauptet wird.
Die im Steuergerät integrierte Diagnose gehört zum Grundumfang elektronischer Motorsteuerungssysteme. Neben der Selbstprüfung des Steuergerätes werden Ein- und Ausgangssignale sowie die Kommunikation der Steuergeräte untereinander überwacht. Unter einer On-Board Diagnose des elektronischen Systems ist die Fähigkeit des Steuergeräts zu verstehen, sich mithilfe der "Software-Intelligenz" ständig selbst zu überwachen, d.h. Fehler zu erkennen, abzuspeichern und diagnostisch auszuwerten. Die On-Board Diagnose läuft ohne Zusatzgeräte ab. Überwachungsalgorithmen überprüfen während des Betriebs die Eingangs- und Ausgangssignale sowie das Gesamtsystem mit allen Funktionen auf Fehlverhalten und Störungen. Die dabei erkannten Fehler werden im Fehlerspeicher des Steuergeräts abgespeichert. Die abgespeicherte Fehlerinformationen, Echtzeitdaten und viele andere Parameter können über die Diagnoseschnittstelle des Fahrzeugs ausgelesen werden.
Aufgaben von OBD
- kontinuierliche Überwachung aller abgasrelevanten Komponenten in allen Fahrzeugen
- jederzeitiges Erfassen und Melden von wesentlichen Emissionserhöhungen während der gesamten Betriebszeit eines Fahrzeugs
- Gewährleistung dauerhaft niedriger Abgasemissionen
- Schutz von Komponenten, z.B. des Katalysators bei Fehlzündungen
- Speichern der Daten bei aufgetretenen Fehlern
- Bereitstellung einer Schnittstelle zum Auslesen der gespeicherten Daten und laufender Betriebsdaten
- anzeigen der Fehlfunktion mithilfe der Motorkontrollleuchte (MIL) im Kombiinstrument
Hat mein Fahrzeug OBD2?
In den USA ist für alle Neufahrzeuge ab dem 1. Januar 1996 OBD-2 vorgeschrieben. Das heißt, daß auch Fahrzeuge für den amerikanischen Markt mit Baujahr 1995 bereits OBD-2 haben können. In der EU ist für Neufahrzeuge mit Otto-Motor ab 1. Januar 2001 mit der EURO-3 Norm OBD-2, hier EOBD genannt, eingeführt worden. Für Pkw-Dieselfahrzeuge wird EOBD am 1. Januar 2003 eingeführt und für Lkw erst am 1. Januar 2005. Auch hier gilt, daß Fahrzeuge mit Baujahr vor diesem Termin schon OBD haben können.
Amerikanische Fahrzeuge haben OBD-2 wenn,
- ein Stecker nach dem Schema des untenstehenden Bildes vorhanden ist und
- sich im Motorraum ein Schild oder Aufkleber mit dem Hinweis "OBD II compliant" befindet.
Bei Fahrzeugen für den europäischen Markt ist ebenfalls
- ein Stecker nach dem Schema des untenstehenden Bildes vorhanden und
- in den Fahrzeug-Papieren die Schadstoffklasse "EURO-3" oder höher eingetragen.
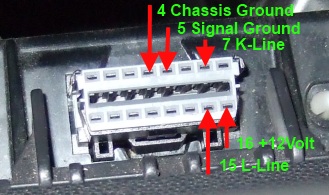
- PIN 2 - J1850 Bus+
- PIN 4 - Fahrzeug-Masse
- PIN 5 - Signal Masse
- PIN 6 - CAN High (J-2284)
- PIN 7 - ISO 9141-2 K Ausgang
- PIN 10 - J1850 Bus
- PIN 14 - CAN Low (J-2284)
- PIN 15 - ISO 9141-2 L Ausgang
- PIN 16 - Batterie (+)-Spannung
Der Stecker soll sich im Umkreis von einem Meter vom Fahrer befinden, üblicherweise unter dem Armaturenbrett oder unter dem Aschenbecher. Es sind nicht alle Stifte des Steckers belegt. Je nach verwendetem Protokoll können weitere Steckerplätze nicht mit Kontakt-Stiften belegt sein. Bei europäischen Fahrzeugen mit Otto-Motor ab Baujahr 2000 gibt es die unten abgebildete gelbe Fehlfunktionsanzeige (MIL)

Aufgrund gesetzlicher Vorgaben erfolgt eine Ansteuerung dieser Fehlerlampe bei Fehlfunktionen. Liegt nur eine temporäre Fehlfunktion vor, erlischt die Lampe wieder automatisch nach 3 fehlerfreien Fahrzyklen (Anlassen, Fahren, Abstellen). Der Fehlerspeicher im Steuergerät wird hingegen erst nach 40 fehlerfreien Warmlaufzyklen selbsttätig wieder gelöscht.
Die über den OBD-2 Stecker auslesbaren Parameter und Werte sind bei allen Fahrzeugen gleich, nicht jedoch die dazu verwendeten Übertragungsprotokolle. Die Hersteller konnten sich hier leider nicht einigen. Als Faustregel gilt: für General Motors Fahrzeuge und leichte Lastwagen wird SAE J1850 VPW (Variable Pulse Width Modulation), für Chrysler Fahrzeuge und alle europäischen und asiatischen Fahrzeuge ISO 9141 mit KWP (Key Word Protokoll) und für Ford SAE J1850 PWM (Pulse Width Modulation) verwendet.
Bei Fahrzeugen ab Baujahr 1996 kann anhand der Steckerbelegung bestimmt werden, welches Protokoll benutzt wird:
| PIN (Signal) | PIN (Masse) | PIN (Signal) | PIN (Signal) | PIN (+12V) | Protokoll |
|---|---|---|---|---|---|
| – | 4 + 5 | 7 | 15* | 16 | ISO 9141-2 |
| 2 | 4 + 5 | – | 10 | 16 | PWM J1850 |
| 2 | 4 + 5 | – | – | 16 | VPW J1850 |
| – | 4 + 5 | 6 | 14 | 16 | CAN Bus |
- * PIN 15 kann, muß aber nicht für ISO 9141 vorhanden sein
- alle anderen Stifte sind für hersteller-spezifische Aufgaben reserviert und haben keine Relevanz für OBD-2
Wenn Ihr Fahrzeug zwar einen OBD-2 Stecker hat, aber nicht die obige Steckerbelegung, haben Sie wahrscheinlich ein OBD-2 Vorläufer Fahrzeug. Es ist obendrein möglich, daß Sie ein Fahrzeug mit der obigen Steckerbelegung haben, das nicht OBD-2 konform ist, wenn es sich um ein Fahrzeug Baujahr vor 1996 handelt. Sicherheit gibt der Aufkleber "OBD II compliant" oder der Eintrag "EURO-3".
Bis ca. 2004-2007 verwenden die meisten europäischen Fahrzeuge ISO 9141-2 mit KWP und haben diese obenstehende Steckerbelegung. Zum einwandfreien Funktionieren des Interface-Kabels soll möglichst kein Spannungsunterschied zwischen Pin 4 und 5 vorliegen und Pin 16 muß +12 Volt führen.
Protokolle, Entwicklungen
Die ersten elektronischen Steuergeräte in Fahrzeugen wurden in den 80er Jahren für das Motormanagement eingesetzt. Sie verfügten über das UART-System. In den 90er Jahren kamen weitere Steuergeräte hinzu, die dann über gemeinsame Datenleitungen auf einem Class 2-Datenbus miteinander kommunizieren konnten. Der Class 2-Datenbus arbeitet nur mit einer festen Baudrate, alle Daten werden mit der gleichen Geschwindigkeit übertragen. Die daran angeschlossenen Steuergeräte müssen kontinuierlich Anwesenheitsmeldungen senden. Die Module befinden sich daher dauernd im Wartezustand.
Für die immer weiter getriebene "Elektronisierung" der Fahrzeuge reicht inzwischen die Datenübertragung in einen Class 2 Netzwerk nicht mehr aus. Auch die Hersteller in den USA schwenken in Zukunft auf das in Europa entwickelte CAN (Controller Area Network) um. Das CAN-Protokoll wird hauptsächlich als 2-Leiterbus mit 500 kbps (Kilo-Bit pro Sekunde) für Funktionen des Antriebs (Motor, Getriebe, Bremsen) eingesetzt. Eine Variante mit Niedergeschwindigkeit (250 kbps) und 1-Leiter dient typischerweise für Komfortfunktionen wie Türverriegelung, Fensterheber und dergl., wo Antwortzeiten von 100-200 Millisekunden ausreichend sind. Da das CAN Kommunikationsprotokoll auf allen Datenbussen gleich ist, lassen sich leicht Daten zwischen Hochgeschwindigkeitsbus und Niedriggeschwindigkeitsbus austauschen. Module in einem CAN System können im Zustand geringer Stromaufnahme "schlafen", bis sie die Anforderung einer Funktion empfangen.
Webseiten-Werkzeuge
Bedienungsanleitung
Montageanleitung
Informationen